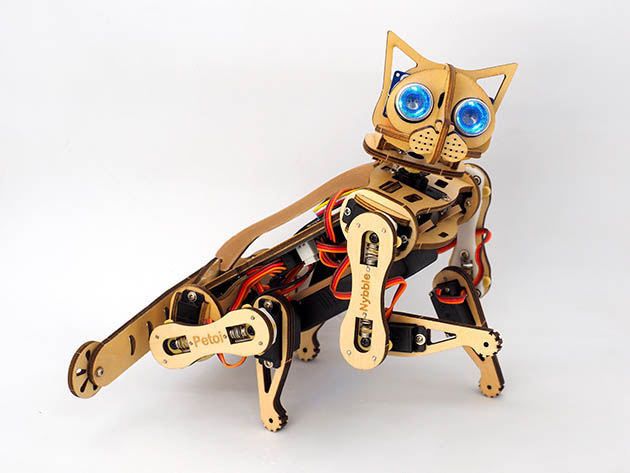
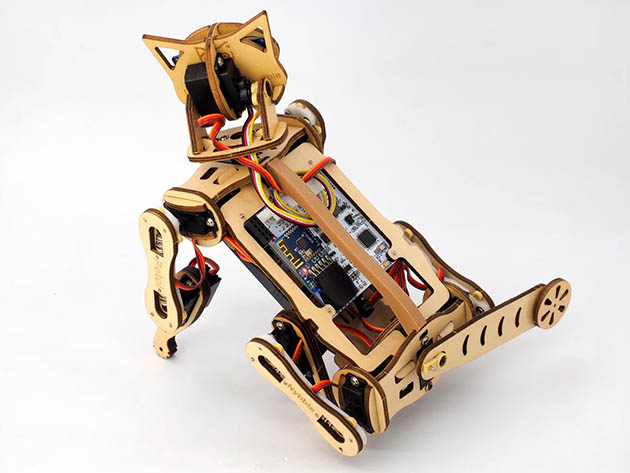
来看看手掌大小的开源仿生机器猫Nybble吧。看它像真正的动物一样玩游戏,用四条腿而不是轮子移动。四足机器人的运动使其在非结构化地形中更自由地航行,并在移动时表达生活的乐趣。随着开源基因的进化,Nybble是一个四足机器人平台,可以将多个制造商的小工具融合到一个有机系统中。通过定制的Arduino板协调所有本能和复杂的动作,您可以插入各种传感器来带来感知。你也可以通过有线/无线连接安装树莓派或其他人工智能芯片来注入人工智能功能。在提高编程技能的同时享受乐趣!
在Indiegogo上成功融资,全球销量超过4000台!
软件水平
- 真正的猫的行为。控制与可编程的行为和新技巧
- STEM &机器人套件。学习编码,自定义,并为自己的宠物编程,使其具有惊人和可爱的技巧。开发创新和先进的四足步行机器人的步态,运动和运动学行为的应用和研究
- 高度可编程。Arduino c++, Python编码,允许导出和导入新技能
- 无线控制。使用Petoi移动/桌面应用程序通过蓝牙连接进行配置和远程控制
- 高度可扩展的。工作与树莓派和Arduino生态系统
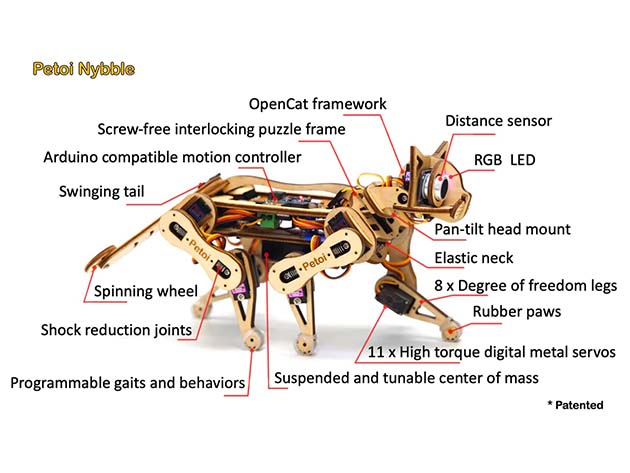
- 建立在OpenCat上。一个四足机器人的开源项目
硬件水平
- 有腿的运动。更自由地在非结构化地形中航行
- 特别调整的消费级伺服作为关节。简化控制系统,降低成本
- 弹簧关节。减少伺服齿轮的冲击
- 5分量系统。车身框架,执行机构,电子,电池和软件
- 功率/重量因子的最佳点。获得令人印象深刻的敏捷性(最大速度达到5个身长/秒)
Nybble V2:有什么新功能?
- 可充电7.4V 1000mAh锂离子电池。提供70分钟的比赛时间
- 新的远程。图形按钮设计,更直观的控制
- 3D打印的小腿片
- 新的伺服系统。新伺服器的区别在于它们的电缆长度。颈部、尾部和四个肩关节使用较短的电缆。较长的电缆用于头部倾斜和四个膝关节
- 统一的螺丝螺杆B和D都换成C(平头)
- 全面改进了软件集成和UI
Nybble适合成人和14岁以上的儿童学习STEM相关主题。孩子们可以在大人的监督下玩Nybble。
平均而言,组装尼布尔的框架需要四个小时。Nybble的基本功能不需要焊接。有几个时刻,你需要非常小心,以正确的顺序和方向插入电线。
需要编码经验。您将需要使用Arduino IDE或Petoi桌面应用程序来上传固件并配置Nybble。